产品简介
上海律邦LB910型全自动清扫机器人的独特设计为您的光伏电站提供高效节能的无水清扫方案。它能以较低的成本,换来较高的发电效率,具有非常好的投资收益。它能使您的光伏电站始终处于最佳发电状态。
LB910型机器人是一种全自动的光伏板清洁系统,现场不需要任何人工干预和操作。它根据预设的程序,每天或每隔几天自动对光伏板进行清扫,且自已充电,自动运行。
LB910型机器人适合于各种类型光伏电站,从几千瓦的分布式电站,到几百兆瓦的大型地面光伏电站。它采用模块化设计,可根据现场阵列情况,定制机器人长度,以适应不同宽度的光伏阵列。它易于维护,专为户外电场服务。
清扫过程
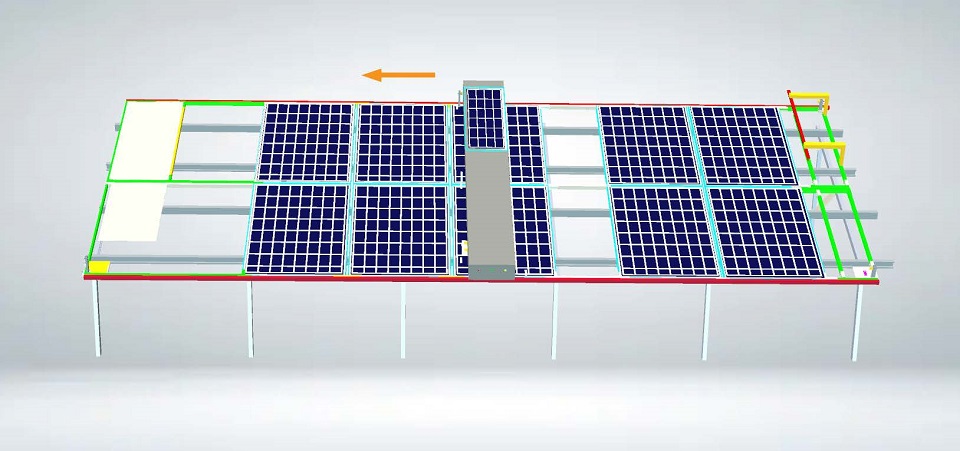
1. 从停车位出发开始清扫
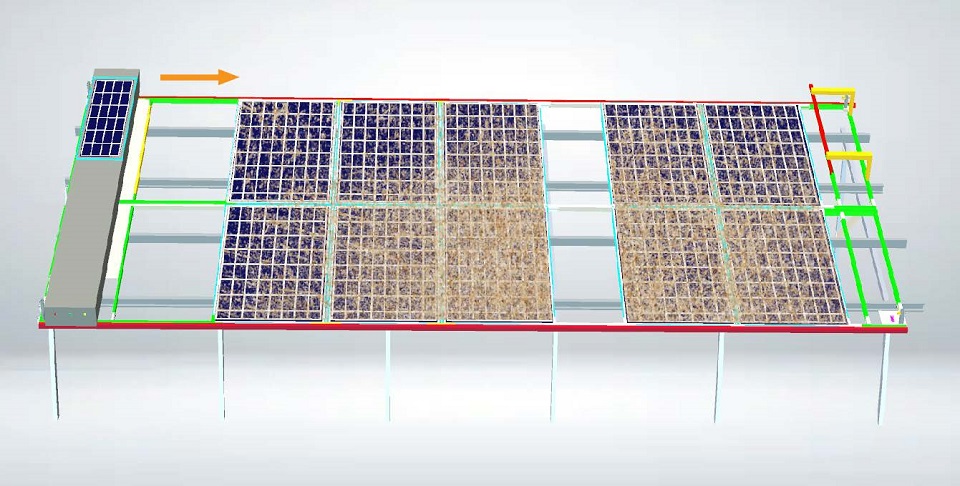
2. 清扫进行中
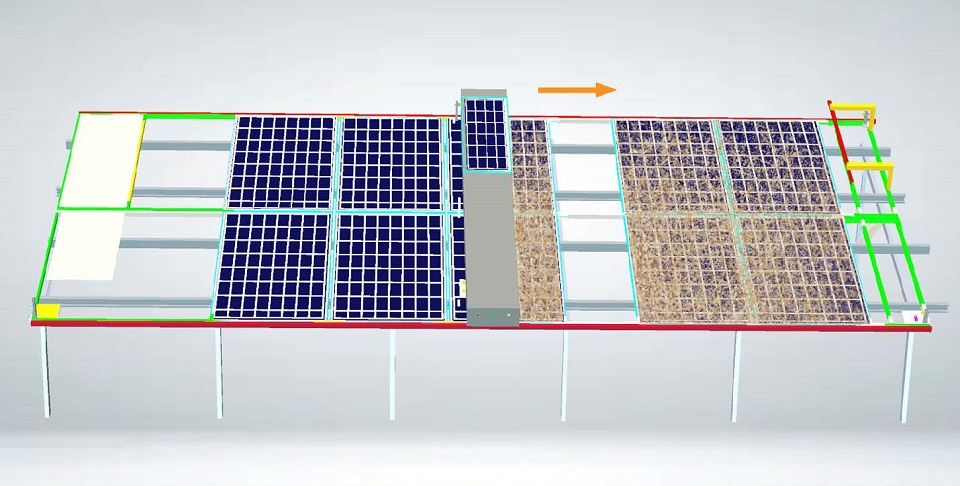
LB910型机器人沿着光伏阵列上下边沿移动,高速旋转的滚刷可将组件表面的积尘清扫干净。为了确保机器人运行稳定和顺畅,也为了保护光伏组件不受压伤,需要在光伏板阵列的上下两端安装导轨,机器人就沿着导轨行进。有时,我们只是在光伏板阵列上下两侧的组件之间安装小过桥导轨,减少机器人行走时对光伏组件产生的震动,也可以起到保护光伏组件的作用。
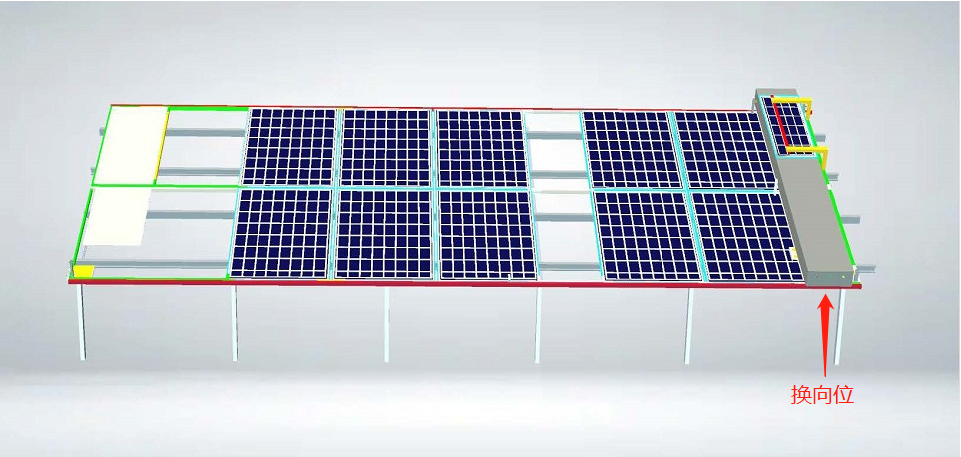
3. 机器人到达换向位,准备折返
4. 从换向位返程途中,最终将停靠在停车位上
蓄电池充电
机器人系统图
安装过程
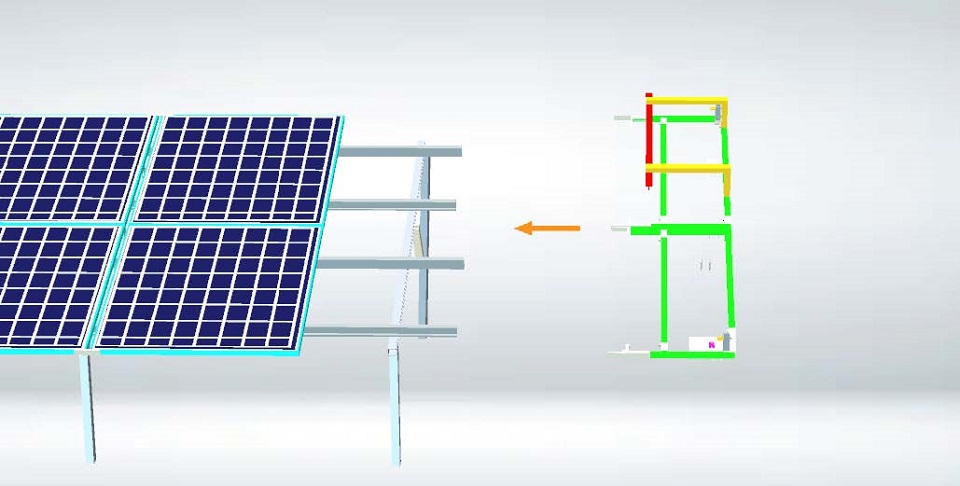
1. 安装停车位
2. 安装换向位
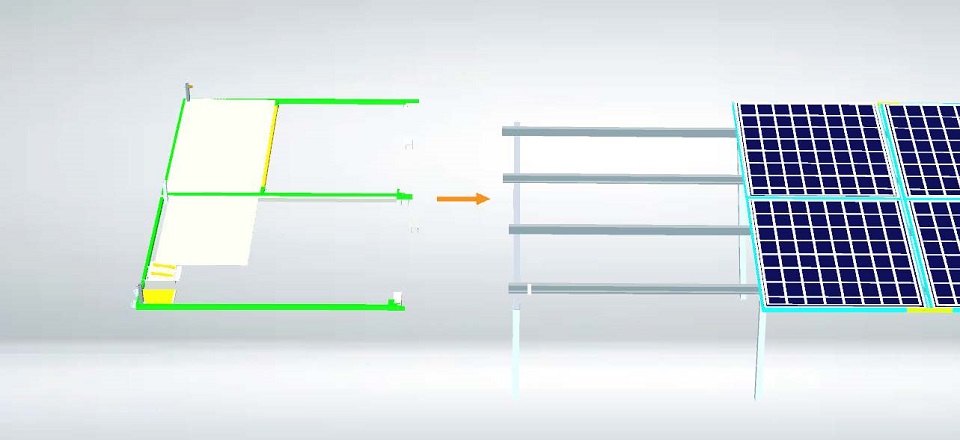
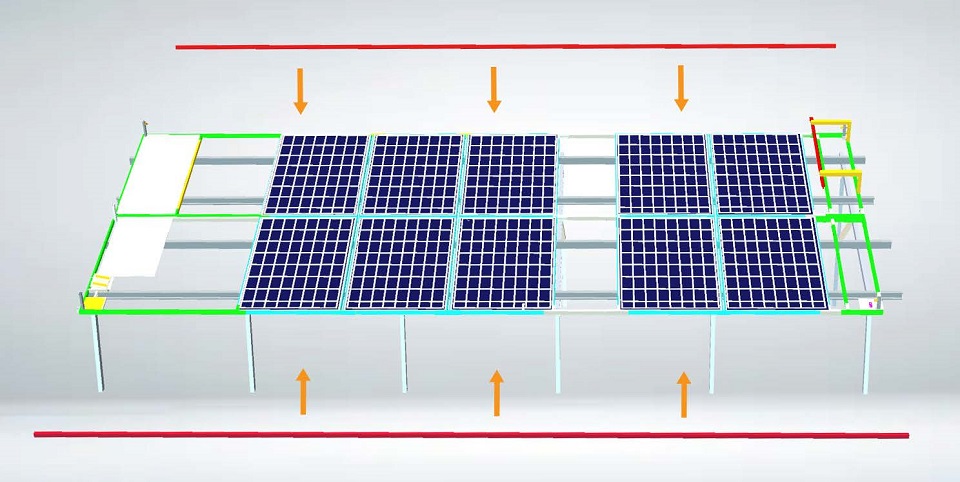
3. 安装上下边框行走导轨
板间小过桥
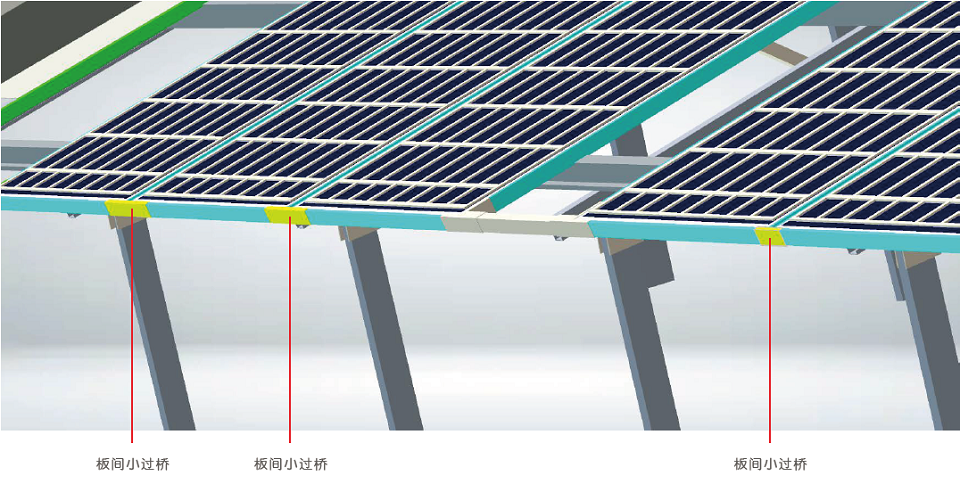
板间小过桥针对不需要安装行走导轨的电站来使用,减少机器人振动,更节省成本。
模块化定制
阵列过桥导轨
2. 清扫进行中
LB910型机器人沿着光伏阵列上下边沿移动,高速旋转的滚刷可将组件表面的积尘清扫干净。为了确保机器人运行稳定和顺畅,也为了保护光伏组件不受压伤,需要在光伏板阵列的上下两端安装导轨,机器人就沿着导轨行进。有时,我们只是在光伏板阵列上下两侧的组件之间安装小过桥导轨,减少机器人行走时对光伏组件产生的震动,也可以起到保护光伏组件的作用。
3. 机器人到达换向位,准备折返
4. 从换向位返程途中,最终将停靠在停车位上
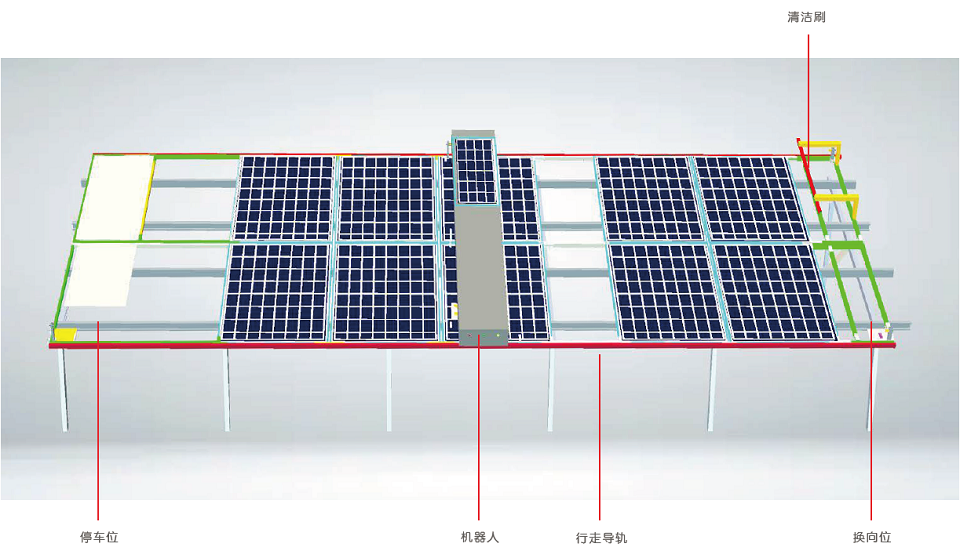
机器人可全自动运行,无需手动清扫。
机器人完成一次清扫后,就返回到停车位。换向位的作用是保证机器人可以清扫到每一块光伏板,换向位上安装有传感器,可以指挥机器人到达终点后及时返回。
蓄电池充电
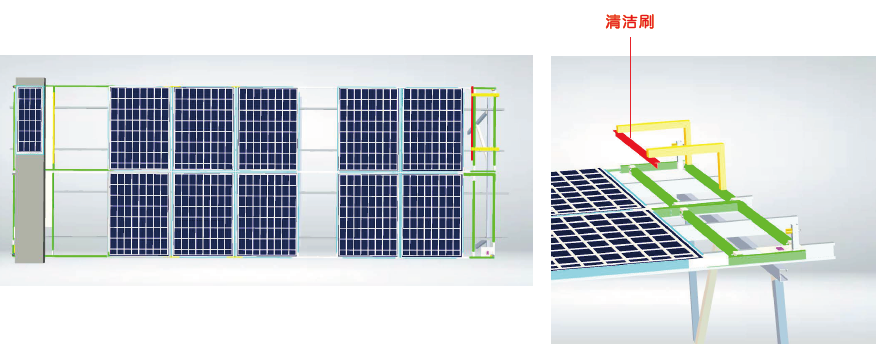
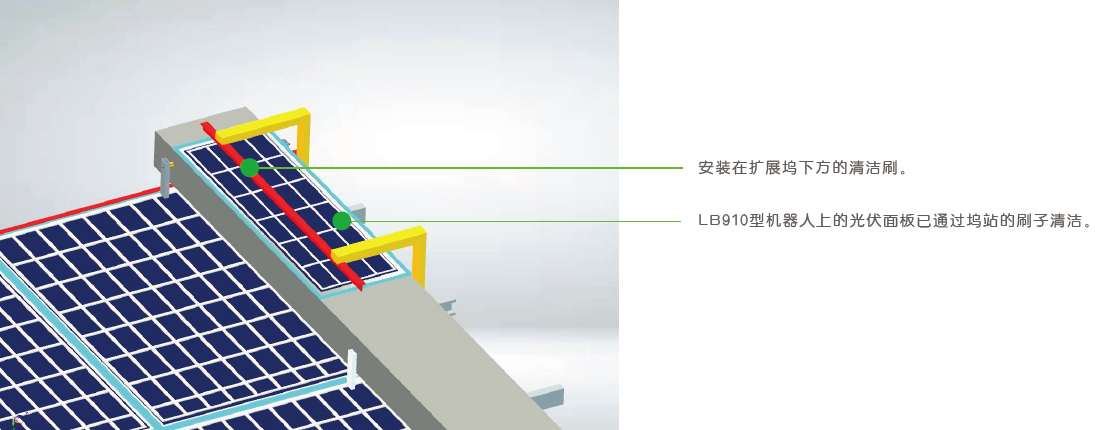
LB910型机器人在蓄电池电压偏低时,可通过自已背负的光伏板进行充电。
为保证充电光伏板高效率工作,我们在换向位处安装有固定的清扫毛刷,当机器人行驶到换向位时,固定毛刷可对自身光伏板表面进行清洁。
机器人系统图
安装过程
1. 安装停车位
2. 安装换向位
3. 安装上下边框行走导轨
板间小过桥
板间小过桥针对不需要安装行走导轨的电站来使用,减少机器人振动,更节省成本。
模块化定制
LB910型机器人可根据光伏板阵列宽度进行定制,机器人长度从2m到6米,以满足不同宽度电站的需要。
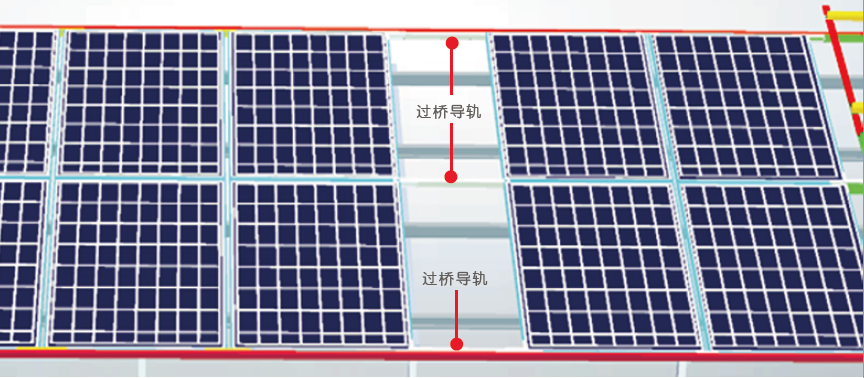
阵列过桥导轨
阵列之间过桥导轨需要根据现场情况进行定制,但采用我公司模块化组件,可加快现场安装速度,并且不用焊接工具,增加了现场安装的灵活性和实用性。
*过桥导轨长度不宜超过3米。
*过桥导轨坡度不超过30度。
电池方案
显著特征
1. 机器人全自动运行,每天或每隔几天在设定时间启动一次,不需要人工干预。清扫的过程包括从左到右清扫,以及返程时从右到左清扫。机器人有手动操作模式,可以在任何时间点执行临时清扫;
2. 机器人可接受无线遥控指令,由管理人员通过上位管理软件进行集群控制,包括校正机器人时钟,修改启动时间,批量指挥机器人运行,以及进行故障自检;
3. 与人工清洗相比,LB910型机器人的投资回报期不超过3年,通过经常性清洗,可保证光伏板处于最高发电状态。如果遇到沙尘暴天气或下雪天气,电站管理人员可通过上位软件临时指挥机器人出行,以实现及时快速的除尘;
4. 机器人设计坚固耐用,可适应各种复杂工况,使用寿命可达10年。长时间工作后,部分组件需要更换,如2-3年更换一次电池,3年左右更换一次毛刷。由于采用模块化设计,现场更换组件方便而省时;
5. 机器人耐侯性强,适合在各种极端气侯情况下工作,工作温度介于-20℃和60℃之间。它可以全年无休留在户外工作;
6. 机器人不需要外部电力,而是由自带光伏板进行自充电。蓄电池也可以由220VAC市电充电,也可以利用光伏电站逆变器进行充电;
7. 采用锂电池供电,使用寿命大于2年。电池容量可保证机器人连续工作2-3小时;
8. 采用抗静电尼龙毛刷,毛刷硬度不会对光伏组件表面造成划伤。毛刷上的残留物可通过刮板进行机械清理;
9. 机器人行进速度为12m/min,旋转毛刷的转速为300RPM;
10. 机器人具有智能判断功能,当系统电量下降过快时,机器人将及时折返,防止因电量不足而停机在阵列中间位置。
电池方案
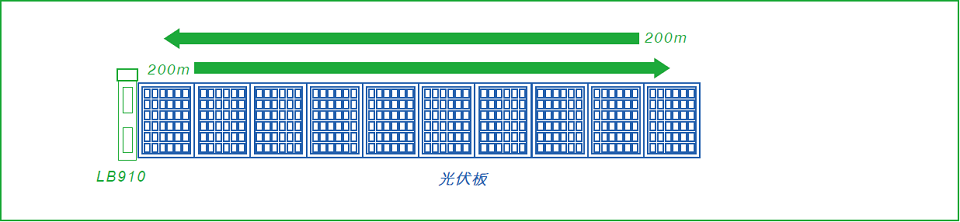
LB910型机器人带有单节或双节24V/15Ah锂电池,具体取决于光伏阵列的长度。
装有单电池的LB910可以清扫长度不超过200m的组件阵列(来回400米)。
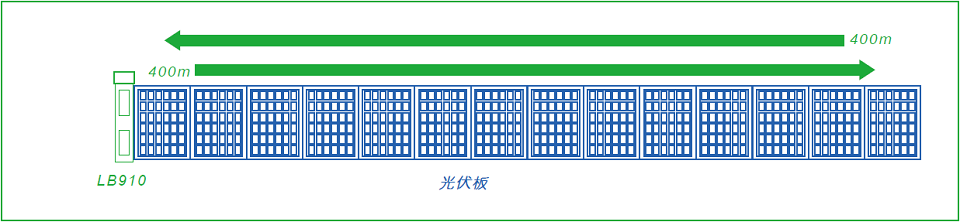
借助两节电池,机器人可以完成长度达400m的光伏阵列的清扫(来回800米)。
电池电量有足够的安全裕度,保证机器人不会因电量不足而停驻在半道上。
单电池方案:
双电池方案:
单电池方案:
双电池方案:
技术参数
| 机械性能具体参数 | |
| 适用电站 | 屋顶电站、渔光互补电站、农光互补电站、地面电站 |
| 行驶介质 | 边沿导轨或光伏板铝型材边沿 |
| 重量 | 30-60Kg |
| 长度 | 根据阵列宽度量身定制 |
| 工作温度 | -20~60℃ |
| 毛刷类型 | 防静电尼龙毛刷,外径120mm |
| 光伏板安全性 | 毛刷不划伤组件表面,机器人不压伤组件 |
| 减速机构 | 齿轮箱减速 |
| 运行性能 | |
| 清扫长度 | 最长400米(来回800米) |
| 清扫宽度 | 2-6米 |
| 爬坡角度 | <30度 |
| 行进速度 | 12m/min |
| 组件上下错位 | <20mm |
| 电学参数 | |
| 蓄电池 | 24V/15Ah |
| 充放电次数 | 2000次 |
| 电机类型 | 24VDC直流有刷电机 |
| 中心控制板 | 单片机控制 |
| 电学性能标准 | 兼容电子、安全和环境标准 |
| 工作模式 | 自动/手动/无线遥控,具有自检、故障反馈、参数设定功能 |
| 无线通讯 | ZIGBEE通讯,支持上位管理软件 |
| 无水清扫 | 无水设计,采用毛刷干刷 |
| 自动运行 | 机器人在预设定时间自启动运行 |
产品型号命名规则